
iSen
Inertial Motion Analysis
iSen offers an entire toolset for biomechanical analysis, biofeedback and reporting. Motion analysis was never that easy… and that fast! The package includes all necessary hardware and software items to perform your analyses swiftly. iSen can also acquire and synchronize data from different devices, and offers a range of utilities for signal processing, event detection, reporting and more. A full biomechanics lab the size of a backpack!
iSen features
These are some of the main features.
WIRELESS
iSen communicates with the sensors via WI-FI
FLEXIBLE SETS
Use no more than the right amount of sensores: 1 to 16

SYNCHRONIZED
Sensor data samples are time-stamped

UP TO 400Hz
Selectable sampling rate, from 25 to 400Hz

INTEGRATABLE
Send or receive data from third-party devices

ADD VIDEO
Easily include reference footage

ACCURACY
Pitch/roll below 0.5", heading below 2"

REPORTS
Templates available for quick generation

DATA LOGGING
Available on IWS, adn soon-to-be supported on iSen






Ergonomics
Evaluate the ergonomics of workstations in a simple and reliable way.
What does it consist of
The iSen system can work with a very varied number of sensors: typically from 1 sensor, which is the simplest configuration, to 17, which is the entire body.
The software license is permanent, without any fee.
The software offers a real-time 3D visualization of the complete or partial skeleton. It is possible to integrate a real video camera.
Finally, the automatic report generator allows you to generate a document with the results of the analysis with one click.
Available protocols
- Individual joints
- Back
- Arms and shoulders
- Complete upper train
- Full body
If you want, you can take a look at the different configurations clicking the following link. Also, we can create new ad-hoc protocols if you are interested.
Download PDF
Forensic
Perform forensic studies easily and reliably
What does it consist of
The iSen system can work with a very varied number of sensors: typically from 1 sensor, which is the simplest configuration, to 17, which is the entire body..
The software license is permanent, without any fee.
The software offers a real-time 3D visualization of the complete or partial skeleton. It is possible to integrate a real video camera.
Finally, the automatic report generator allows you to generate a document with the results of the analysis with one click.
Available protocols
- Individual joints
- Full body
If you want, you can take a look at the different configurations clicking the following link. Also, we can create new ad-hoc protocols if you are interested.
Download PDF
What does it consist of
The iSen system can work with a very varied number of sensors: typically from 1 sensor, which is the simplest configuration, to 17, which is the entire body.
The software license is permanent, without any fee.
The software offers a real-time 3D visualization of the complete or partial skeleton. It is possible to integrate a real video camera.
The automatic report generator allows you to generate a document with the results of the analysis with one click.
Available protocols
- Lower train
- Full body
If you want, you can take a look at the different configurations clicking the following link. Also, we can create new ad-hoc protocols if you are interested.
Download PDF
Rehabilitation
The simplest and most reliable portable gait analysis.
What does it consist of
The iSen system can work with a very varied number of sensors: typically from 1 sensor, which is the simplest configuration, to 17, which is the entire body. Also, we can create new ad-hoc protocols if you are interested.
The software license is permanent, without any fee.
The software offers a real-time 3D visualization of the complete or partial skeleton. It is possible to integrate a real video camera.
The automatic report generator allows you to generate a document with the results of the analysis with one click..
Available protocols
- Individual joints
- Full body
If you want, you can take a look at the different configurations clicking the following link. Also, we can create new ad-hoc protocols if you are interested.
Download PDF
Research
iSen marking the way forward.
What does it consist of
The iSen system can work with a very varied number of sensors: typically from 1 sensor, which is the simplest configuration, to 17, which is the entire body. Also, we can create new ad-hoc protocols if you are interested..
The software license is permanent, without any fee.
The software offers a real-time 3D visualization of the complete or partial skeleton. It is possible to integrate a real video camera.
The data, collected by wireless sensors (WiFi) at a frequency between 25 and 400 Hz, offers the information on screen and ready to export:
- Raw sensor data (quaterns, gyroscope, accelerometer, etc)
- Graphs with biomechanical curves (for example: knee flexion over time)
- Event sequences during capture
The automatic report generator allows you to generate a document with the results of the analysis with one click.
Available protocols
- Individual joints
- Full body
If you want, you can take a look at the different configurations clicking the following link. Also, we can create new ad-hoc protocols if you are interested.
Download PDFOperation workflow
Choose your analysis

Place the sensors

Record
Review and conclude
What's included in iSen
iSen comprises a broad set of software and hardware

Software
Permanent license. No fees. Including biomechanics analysis protocols

IMU Sensors
From 1 to 18 sensors. Up to 400 Hz. Compatible with IWS, Delsys and Cometa
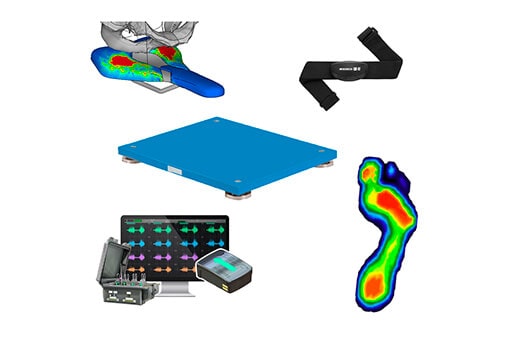
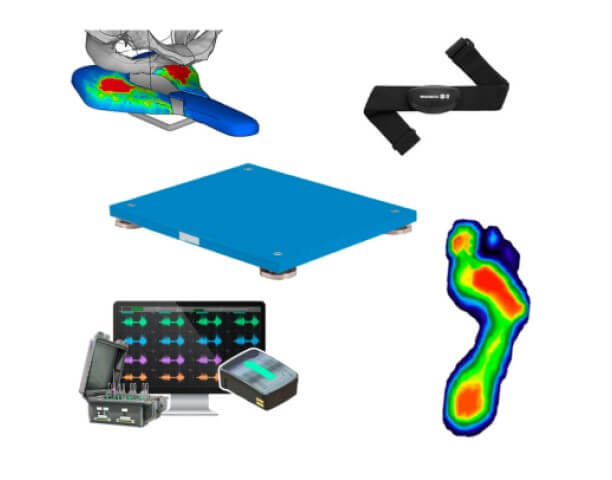
Integrations
Compatible with third-party devices. Real video, Force Platforms, Pressure mats, ANT+ devices, EMG data

Training & Support included
Our technical team will guide you through the first recordings and tests until you are comfortable. In Spanish and English, and in less than 24 hours. STT's support is one of the pillars of its services and for which it is most recognised.
iSen case studies
Users who have trusted iSen attest to its usefulness
Do you want more information?
Download our informative brochures or consult the frequently asked questions.
You may also be interested
3DMA - 3D Optical Motion Capture and Analysis
Discover our 3DMA suite for motion capture through optics and the different protocols available in 3DMA. Select the ones you are looking for.

2DMA Suite - 2D Optical Motion Capture Software
Based on HD, high-speed video analysis, 2DMA products can be the perfect tool for quick assessments. 2DMA Optical Motion Capture Software. is the best option to get a professional feedback for athletes and coaches.